
At present, whether it is in the field of industrial automation, automotive, or household appliances, various end markets have put forward higher requirements for BLDC motor control performance. They not only need the motor to be able to achieve high efficiency and multi-functional control, but also need the motor to achieve low noise and low vibration control effect while pursuing high speed.
Under the increasing high standard performance requirements, more and more high-performance BLDC motor drive control chips have emerged under the two major opportunities of high market demand and high performance.
Many domestic manufacturers have launched BLDC motor driver chips and solutions, in the performance compared with the international manufacturers of driver chips do not fall, and more cost-effective, in the technical support of domestic manufacturers can also give customers more support in time.
Looking at the domestic BLDC chip market, FOC has almost become the standard, and each family integrates more peripheral configurations on the basis of the application of FOC to obtain greater competitiveness.
What is FOC?
Field-oriented Control (FOC), that is, Field Oriented Control, also known as vector frequency conversion, is currently the best choice for efficient control of brushless direct current motor (BLDC) and permanent magnet synchronous motor (PMSM).
FOC precisely controls the size and direction of the magnetic field, making the motor torque stable, low noise, high efficiency, and has a high-speed dynamic response. At present, it has gradually replaced the traditional control method in many applications, and has attracted much attention in the motion control industry.
Principles of FOC
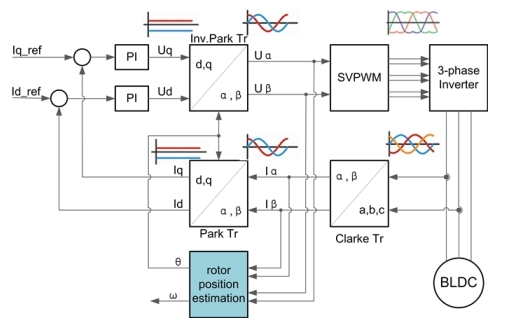
FOC control first needs to obtain the motor rotor position, motor speed, current size and other information as feedback input, need to collect the motor phase current, and carry out a series of mathematical transformation and estimation algorithm to obtain the decoupled easy-to-control feedback quantity.
The controller adjusts dynamically according to the error between the feedback quantity and the target value, and finally outputs 3-phase sine wave to drive the motor to rotate.
Sensor FOC/ Sensorless FOC
For FOC with sensor, because the encoder can feedback the position information of the motor rotor, the control is simple, but the control performance is often higher.
For sensorless FOC, it is difficult to calculate rotor position by collecting motor phase current and using position estimation algorithm.
However, the wiring is simple, the cost is low, the reliability is high, and the control goals such as high efficiency, low vibration, low noise and high response speed can be realized to the maximum extent, so it has gradually become the mainstream trend of the industry, and it is widely used in the occasions of fans.
免责声明: 本文章转自其它平台,并不代表本站观点及立场。若有侵权或异议,请联系我们删除。谢谢! Disclaimer: This article is reproduced from other platforms and does not represent the views or positions of this website. If there is any infringement or objection, please contact us to delete it. thank you! |

WeChat Official Account

WeChat Service
 Email
Email QQ
QQ 13823761625
13823761625
