
无刷直流电机的控制原理(无刷直流电机工作原理)
Date:January 31, 2024 Views:7106
01.概观
从简单的钻机到复杂的工业机器人,许多机器和设备都使用无刷DC电机将电能转化为旋转运动。无刷DC电机,也称为BLDC电机,与无刷DC电机相比有很多优点。BLDC电机效率更高,需要的维护更少,因此在许多应用中已经取代了有刷电机。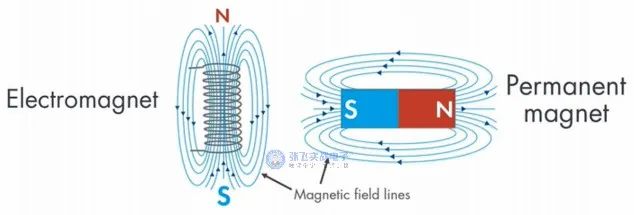
图1:电磁场和永磁磁场示意图
两种电机的工作原理相似,都是通过永磁体和电磁体的磁极相吸相斥产生旋转运动。但是这些电机的控制方式却大相径庭。BLDC需要一个复杂的控制器来将单个DC电源转换为三相电压,而有刷电机可以通过调整DC电压来控制。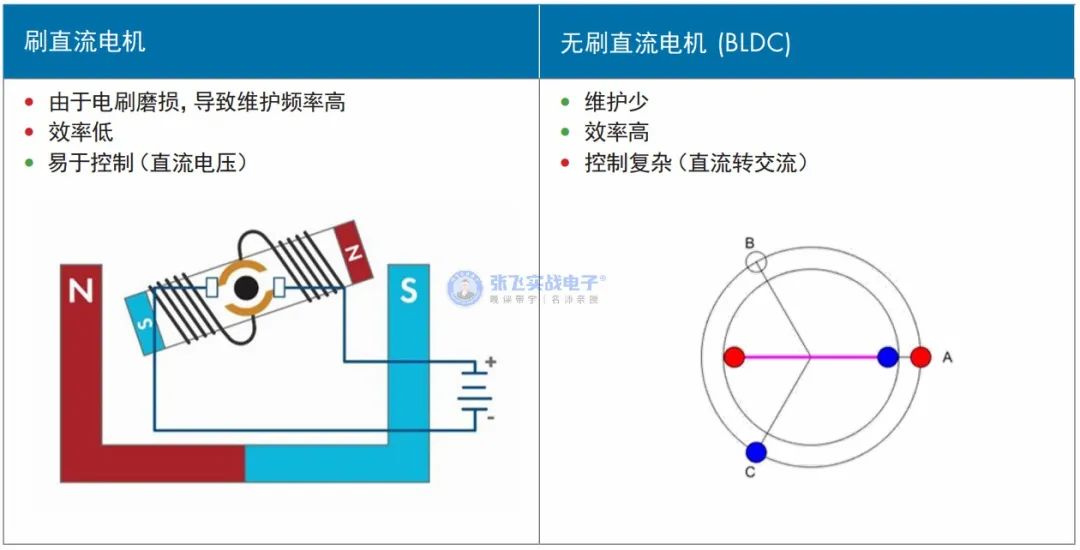
图2:有刷电机和DC无刷电机的比较
2.DC汽车的类型
2.1.传统有刷DC电机
如下图所示,在有刷DC电机中,DC电流通过转子的线圈绕组,使电磁铁产生极性。这些转子的磁极与固定永磁体(称为定子)的磁极相互作用,使转子旋转。
转子每转半圈后,需要切换线圈绕组中电流的极性,以切换转子磁极,保持电机旋转。
这种电流极性的转换叫做换向。
换向是通过机械手段实现的:转子每转半周,电触点(称为电刷)与转子上的换向器成回路连接。
这种身体接触,久而久之会导致电刷磨损,从而导致电机无法工作。
图3:有刷电机工作原理示意图
2.2.无刷DC电机
BLDC电机采用电子换向代替机械换向,克服了有刷电机的上述缺陷。为了更好地理解这一点,有必要进一步了解BLDC电机的结构。BLDC电机在结构上与有刷电机相反,其永磁体安装在转子中,线圈绕组成为定子。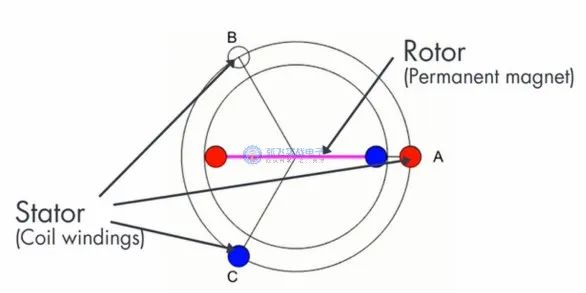
图4:无刷DC电机工作原理示意图
电机的磁体布局不同,定子可能有不同数量的绕组,转子可能有多个极对,如下图所示。

图5:无刷DC电机极对示意图
3.模拟BLDC电机观察反电动势曲线。
BLDC电机在结构上类似于PMSM,其永磁体放置在转子中,它被定义为同步电机。在同步电机中,转子和定子磁场是同步的,即转子的转速与定子磁场相同。
它们的主要区别在于它们的反电动势(反电动势)的形状。马达转动时就像发电机一样。也就是说,定子中产生的感应电压与电机的驱动电压相反。反电动势是电机的一个重要特性,因为它的形状决定了电机最优控制所需的算法。
BLDC电机的设计使其反电势为梯形,所以一般采用梯形换向控制。BLDC的梯形反电动势由梯形换向控制。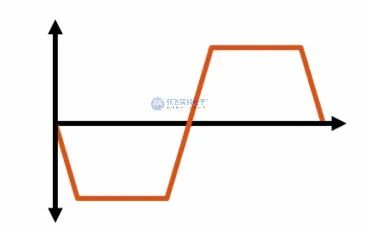
图6:无刷DC电机反电动势波形示意图
PMSM的反电动势是正弦的,所以采用磁场定向控制。PMSM正弦反电动势由磁场方向控制。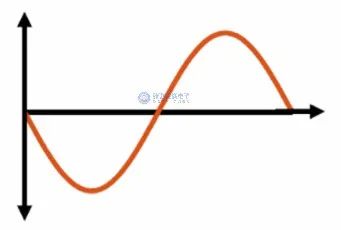
图7:PMSM反电动势波形示意图
在电机控制领域,PMSM和BLDC这两个术语有时会混淆,这可能会导致其反电动势曲线的混乱。本文将BLDC电机严格定义为具有梯形反电动势的电机。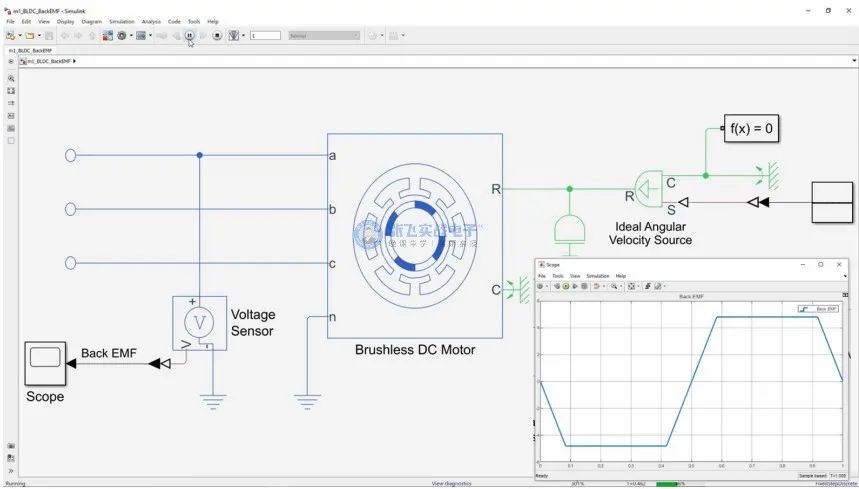
图8:查看反电动势波形的BLDC电机模拟
在图中,Simulink用于模拟具有开路端子的单极对BLDC,即没有电流流过线圈。如果施加扭矩来驱动转子,电动机将充当发电机。可以测量A相电压随时间的变化,从而观察电机的反电动势形状。电压波形显示BLDC电机反电动势呈梯形,部分区域电压平坦。
4.六步相变
为了更好地理解BLDC电机在施加外部电压时的行为,我们将使用前面介绍的配置,其中转子由单极对组成,定子由三个夹角为120度的线圈组成。让电流通过线圈,给线圈通电(这里指的是A相、B相、C相)。转子的北极显示为红色
首先,线圈没有通电,转子处于静止状态。当在A相与C相之间施加电压时(如下图所示),会沿着虚线产生一个复合磁场。这导致转子开始旋转,从而与定子磁场对齐。
图9:定子磁场产生的示意图(虚线)
线圈有六种通电方式,如下图所示。每次换相后,定子磁场相应旋转,从而带动转子旋转到图示位置。在下图中,转子的角度是相对于水平轴的。转子有六种对中方式,它们之间相差60度。
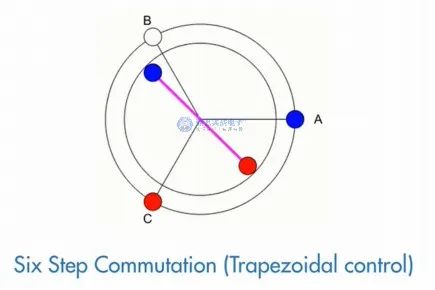
图10:线圈通电示意图
也就是说,如果每隔60度以正确的相位进行换向,电机将持续旋转,如下图所示。这种控制称为六步换相或阶梯控制。
图11:六步换向(梯形控制)
这种电机可以包含更多的极对,但这需要更频繁的换向。为了在正确的时间和正确的相位执行电机换向,控制器需要随时知道转子的准确位置,该位置通常由霍尔传感器测量。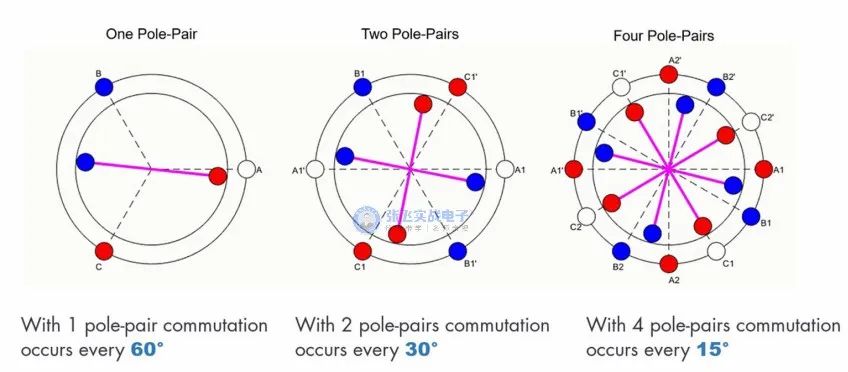
图12:不同极对的电机换向角示意图
5.电机和扭矩生成
下图箭头表示相对磁力,箭头粗细表示场强。相同的磁极互相排斥,所以转子逆时针旋转。同时,相反的磁极相互吸引,从而增加同方向的扭矩。
转子旋转60度后,发生下一次换向。
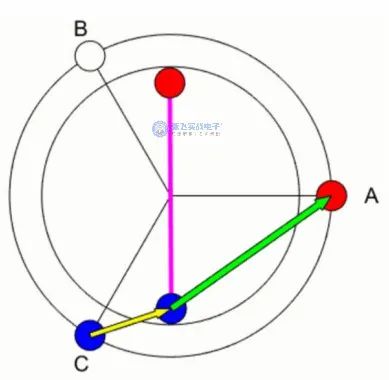
图13:磁场作用示意图
将前面讨论过的定子磁场叠加在上图中,可以清楚地看到,在这种换相模式下,转子始终没有对准定子磁场(图中黄色虚线),而是一直追赶定子磁场。
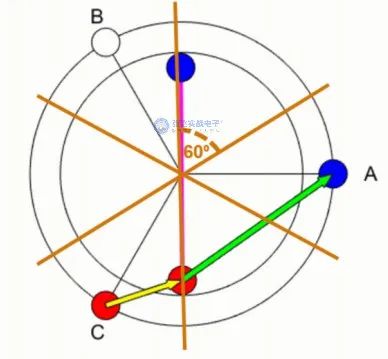
图14:定子磁场和转子磁场示意图
在BLDC电机中使用这种方法来改变相位有两个原因。首先,如果让转子和定子的磁场完全对齐,此时产生的转矩将为零,不利于旋转。其次,当磁场的夹角为90度时,可以产生最大的扭矩。所以目标是让夹角接近90度。
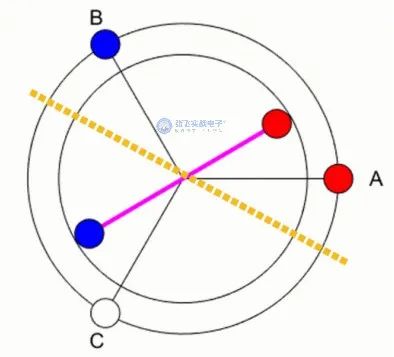
图15:转子磁场和定子磁场之间的夹角示意图
但在BLDC电机中,采用六步换向,夹角不能一直保持在90度,夹角会在60度到120度之间波动,如下图所示。这是因为梯形控制的本质比较简单。更先进的方法,如磁场定向控制,可以实现定子和转子磁场之间的90度角,从而产生更大的扭矩。这种方法常用于前面提到的PMSM控制。
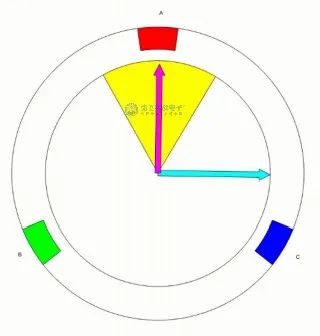
图16:转子磁场和定子磁场的夹角示意图
6.三相逆变器的工作原理
为了控制六步换相过程中的相位,可以使用三相逆变器将直流电引导至三相,从而在正(红色)和负(蓝色)电流之间切换。为向其中一相提供正电流,需要接通连接到该相的高端开关,为提供负电流,需要接通低端开关。
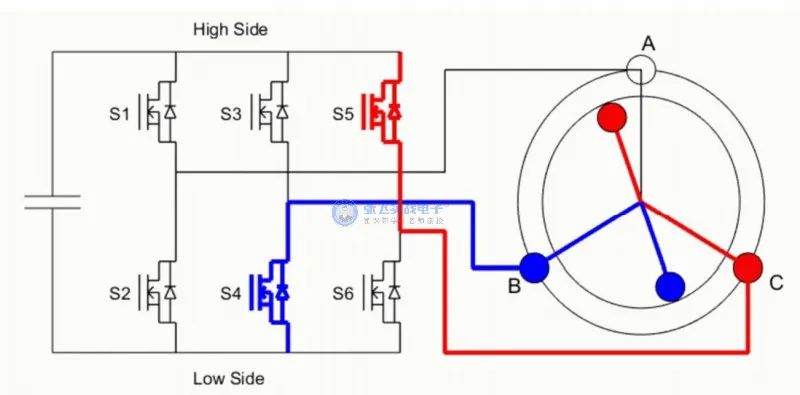
图17:三相逆变桥示意图
当转子和定子磁场的夹角在60-120度之间时,按上述方式进行此操作,三相逆变器可保持电机匀速旋转。为了改变电机速度,可以调节施加的电压。为了在不改变电源电压的情况下控制电机速度,可以使用脉宽调制(PWM)。
免责声明: 本文章转自其它平台,并不代表本站观点及立场。若有侵权或异议,请联系我们删除。谢谢! |

WeChat Official Account

WeChat Service
 Email
Email QQ
QQ 13823761625
13823761625
